私たちはあなたのプライバシーを非常に重視しており、私たちのウェブサイトにアクセスした際には、使用するすべてのクッキーに同意してください。パーソナルデータの処理に関するより多くの情報にアクセスできますプライバシーポリシーです.
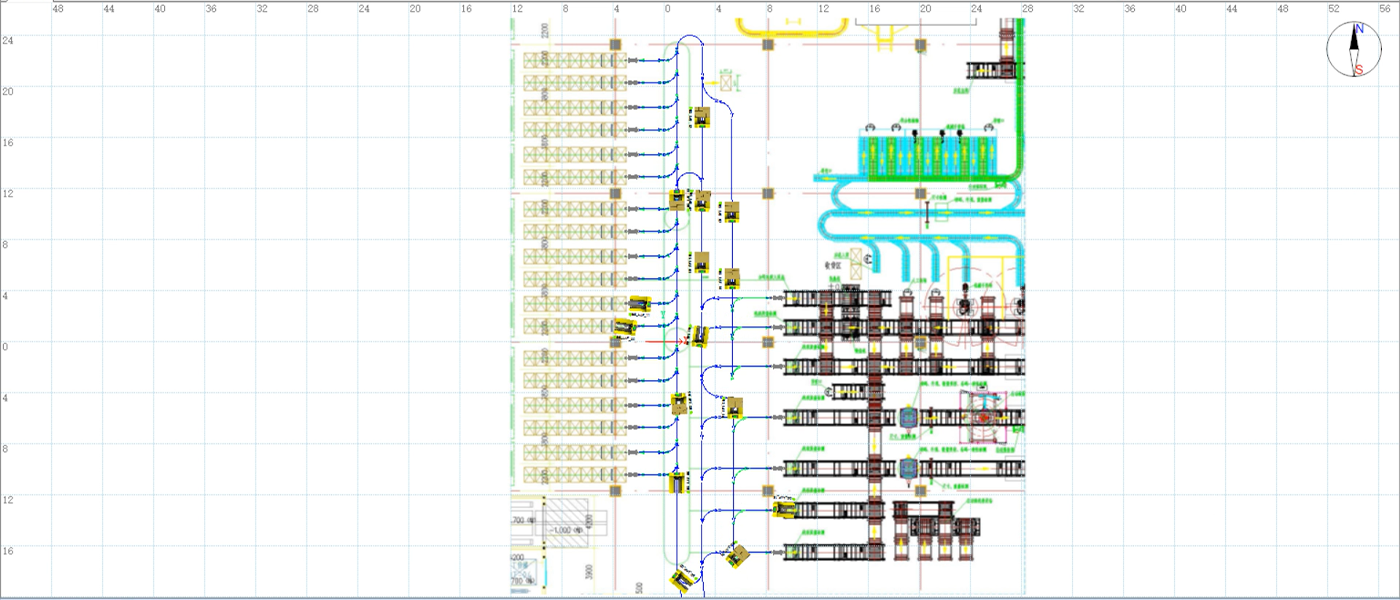
蘭剣知能のAGVスケジューリングソフトウェアは、AGVスケジューリング技術の時間予測メカニズムに基づいて、大規模なAGV応用シナリオでは、効果的にAGVの稼働率を向上させ、トラフィック回避の確率を減らし、全体的なシステム効率を達成することができます。

01
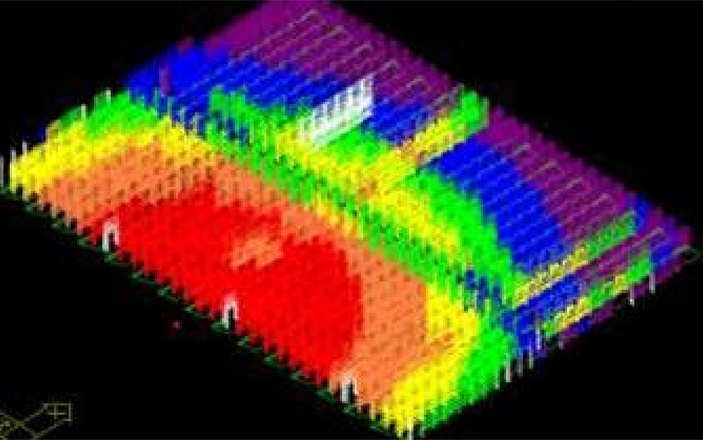
AGVのタスク情報に基づき、一連の連続したタイムウィンドウモデルが生成してAGVのリアルタイムの位置を表現することで、動的な実環境の認識と表現が実現され、車両間の時間的・空間的な衝突を解決します。
02
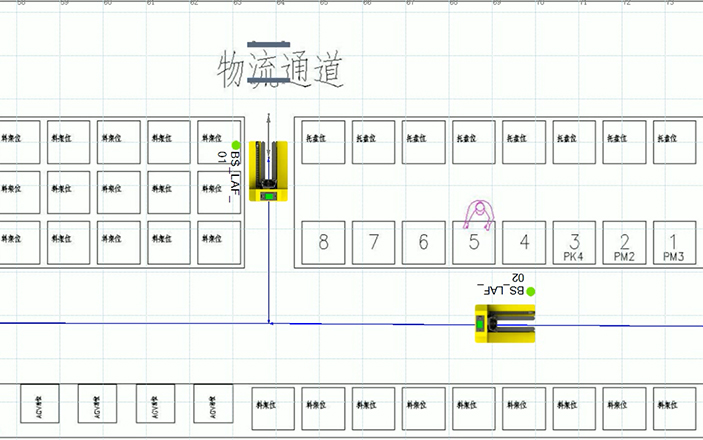
車両のフォームファクターを考慮することで、時間枠で車両の動作環境をより正確に記述することができます。業界で一般的に使用されている制御ルールに基づくスケジューリング技術と比べ、交通規制の発生確率を低減し、大規模なAGV並列作業の効率を向上させることができます。

03
シミュレーション機能とモニタリング機能を組み合わせることで、シミュレーション機能ではモニタリング機能の各種詳細パラメーターを十分に参照することができ、より正確なシミュレーション結果を得ることができます。モニタリング機能ではシミュレーション機能に仮想車両のコンセプトを導入しており、モニタリング機能で車両を追加した後のスケジューリング効果を分析することができ、機能がより豊富になっています。
Contact Us











-114.jpg)